 |
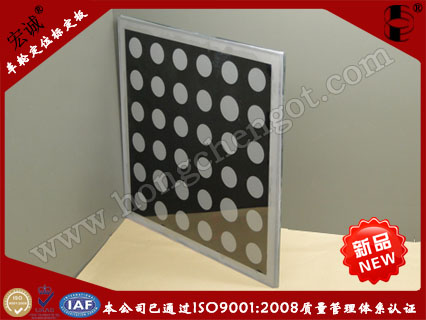
名称:汽车4S店专用四轮定位标定板306mm*306mm
产品编号:HBM03-CLDW-4
产品规格:306mm*306mm
图形精度: |
 |
|

分享按钮
本产品介绍:
|
产品名称
|
产品型号
|
有效图形尺寸
(mm)
|
图形精度
(μm)
|
|
汽车4S店专用四轮定位标定板
|
HBM03-CLDW-4
|
306*306
|
|
产品说明
1.有效图形尺寸:306×306mm
2.圆点直径:小圆点:31mm;大圆点36mm
3.圆点个数:一行有6个圆点;有6行,一共36个圆点(其中3个大圆点,33个小圆点)
应用说明
1.测量原理:
对于V3D定位仪,其系统是由计算机主机、信息主板、高性能数字照相机和4个目标盘等基本元件构成。照相机的发光二极管不断发射固定频率的红外线,目标盘接收到光线后,将光线反射给照相机进行成像,照相机将所成图像与先储存在电脑中的图像数据进行比较后,精确地计算出目标与相机间距离,再通过数据处理后,计算出车辆相关尺寸,得出相应四轮定位数据。利用高技术的数字相机和V3D技术,计算出车辆车身平面、轮轴平面和每一个车轮的车轮平面。利用三个平面的几何关系确定车辆的四轮定位数据,并将这些数据与原厂数据进行比较,告知操作人需要调整的角度信息。
2.测量方式:
对于V3D定位仪,是通过照相机来实现光电数字成像,实现定位测量。
3.信号传输:
对于V3D定位仪,在进行车轮定位时,每个车轮上安装的是反光盘(亦称目标盘即车轮定位标定板),反光盘反射来自照相机总成中LED灯发出的红外线,并被数字相机接收,生成数字信号,再由计算机处理该信号。信号传输过程中,相机与安装在车轮上的目标盘之间无需任何线的连接。
4.定位操作:
对于V3D定位仪,因照相机高高地立于车辆及举升机的正前方,不易发生传输信号的遮挡问题。且定位操作步骤简化。
V3D的组件
V3D定位仪使用的目标盘是经过特殊设计的,其上面有若干个圆斑,圆斑是由特殊的反光材料制成,非对称排列且大小不等,以便利用圆的透视和透视缩短特性,并且相互校验。目标盘只是一个被动的反光板,其上没有任何连接线路和感应性的电子器件。V3D的照相机是由一系列发光二极管(LED)和CCD照相机组成。发光二极管用于照亮目标盘。光线照到目标盘时并反射回来被照相机接收。这些圆的映像经软件处理,以确定距离和角度。LED灯所发出光线的亮度非常高。目标盘反射回来的光被过滤,只允许LED光被使用。LED光每次闪光,照相机都捕捉到一张映像。
5、3D模式
1)定位角度表达
如上面所述,根据透视原理,V3D测量系统可测量出目标盘所移动的距离;根据透视缩短原理,当圆环沿纵轴旋转时,我们可以此方式测量出前束角的变化。当圆环沿横轴旋转时,我们可以此方式测量出主销后倾角的变化。如“图11”所示,将目标盘通过夹具以特定角度安装在车轮上,当前后推动车辆时,车轮及目标盘随之前后滚动,这一过程中目标盘的对称线将形成一组矢量曲面,两条对称线之间的夹角叫矢量角,通过矢量角,我们可计算出车
轮外倾角的变化。
2)建立测量基准平面
车身平面 V3D在建立模型时首先确定四个车轮旋转轴线,再由四个轴线确定车轴平面,即车身平面,这个平面是V3D测量系统的测量基准平面。这个基准平面的优点是不依赖于重力或重力传感器。我们做个实验,将车体向后倾斜,来测量主销后倾角值是否变化。由于基准平面的倾斜,基于重力原理的定位仪此时会显示出后倾角的变化;由于V3D的参考平面是车身平面,V3D测量系统测量的后倾角仍然是0度,没有变化,实验中,我们只是降低了车身后部,实际上主销后倾角没有变化,而V3D测量系统真实地反映了这一情况。
本产品图片:



 汽车3D四轮定位标定板2...
汽车3D四轮定位标定板2... 汽车四轮定位标定板168...
汽车四轮定位标定板168... 3D四轮定位标定板204...
3D四轮定位标定板204...